周辺の環境情報を適切に考慮したニホンジカの移動経路予測を行うAI技術を開発
2024年4月15日
周辺の環境情報を適切に考慮した
ニホンジカの移動経路予測を行うAI技術を開発
国立大学法人ballbet贝博足彩大学院グローバルイノベーション研究院の藤田桂英教授らは、周辺の環境情報を適切に考慮しながらニホンジカの移動経路予測を行うことができるAI技術を開発しました。この成果により、移動経路予測によるニホンジカをはじめとした野生動物の管理の自動化や生態の解明への活用が期待されます。
本研究成果は、Expert Systems with Applications(2024年9月15日付)の掲載に先駆け3月21日にオンラインで公開されました。
論文名:Sika Deer Trajectory Prediction Considering Environmental Factors by Timeseries Transformer-Based Architecture
URL:https://doi.org/10.1016/j.eswa.2024.123630
背景
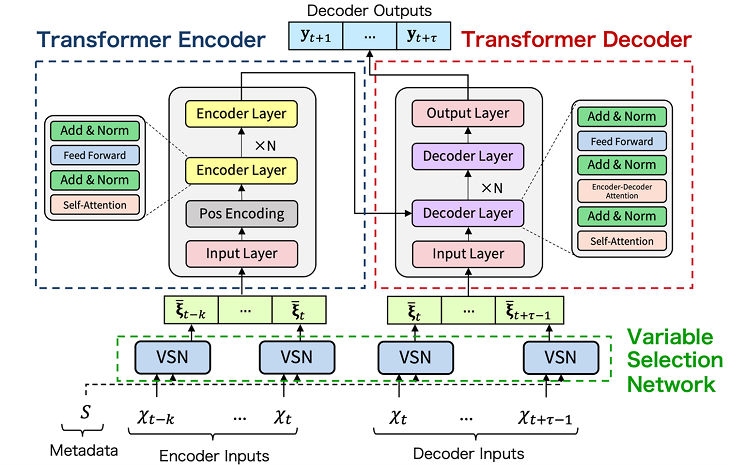
罠による捕獲や狩猟に頼らない野生動物の保護管理を目的として、人工知能 (AI)により野生動物の移動経路を予測することが重要となってきています。移動経路の予測のための既存の機械学習*注1)のアプローチは、これまで移動した経路における周辺の環境情報を適切に考慮できていませんでした。一方、移動経路予測に有効な最先端の機械学習モデルとしてTransformer *注2)が知られています。しかし、周囲の環境要因を考慮しながら野生動物の移動経路を予測するTransformerはこれまで提案されていませんでした。
研究体制
ballbet贝博足彩工学府情報工学専攻の風間 健太郎 氏(2022年3月修了、現在三菱電機株式会社勤務)、藤田 桂英 教授(ballbet贝博足彩大学院グローバルイノベーション研究院)、小池 伸介 教授(ballbet贝博足彩大学院グローバルイノベーション研究院)、篠田 悠心 氏(ballbet贝博足彩大学院連合農学研究科(研究当時)、現在国立環境研究所勤務)が共同で、ballbet贝博足彩融合研究支援制度:TAMAGOの支援を一部受けて行ったものです。
研究成果
本研究では、周囲の環境要因を考慮できる時系列Transformer*注2)をベースとした野生動物の移動経路を予測する機械学習のアプローチを提案しました。本アプローチは長期の各時点同士の依存関係を学習することができる最先端の機械学習モデルに基づいた移動経路予測モデルに対して、周囲の環境要因を考慮することができる機構を付加することによって、より高性能に移動経路の予測を行うことが可能です。また、提案手法では、移動経路を予測する際に、訓練に使用した過去の移動経路のどの部分に着目しているかを可視化*注3)することができます。神奈川県丹沢エリアを主とした1年以上の期間のニホンジカの観測記録を評価のためのデータセットとして用いました。本データセットには、ニホンジカの個体情報、緯度と経度、日射量、斜度、標高、植生などの変化情報が記録されています。評価実験の結果、環境要因を考慮している提案手法が既存手法より高い性能であることを示しました。また、移動経路における土地利用と植生に関する環境情報が正確な予測のために特に有効であることが明らかになりました。さらに、提案した機械学習モデルが、観測期間内に個体が大きく移動した時点を注目して予測しており、ニホンジカが移動経路を大きく変更する際の位置情報やその部分の環境情報を適切に考慮しています。
今後の展開
今後、本技術によりニホンジカをはじめとした野生動物の移動経路予測を適切に行うことで、野生動物の生態や移動経路の変化に適応した保護管理を行うことが可能となります。また、新たな野生動物の生態解明への活用が期待されます。
用語説明
注1)機械学習
人工知能(AI)の手法の1つで、コンピューターに大量のデータを読み込ませ、データ内に潜むルールを学習させることで、未知のデータを判断するためのルールを獲得することを可能にする技術です。
注2)Transformer
機械学習の手法の1つで、エンコーダ-デコーダ機構*注4)により構成されています。Transformerにおけるエンコーダの機能は、入力のどの部分が互いに関連しているかに関する情報を含め、入力を処理して目的の情報に変更することができます。 各エンコーダは一連の処理結果を次のエンコーダに入力として渡します。デコーダはballbet贝博足彩のエンコーダから渡された情報を取得して処理し、組み込まれた特徴情報を使用して出力を生成します。これを実現するために、各エンコーダ層とデコーダ層はアテンション機構*注5)を利用しています。
注3)可視化
機械学習内部情報などの目に見えない情報を見える状態に整え、必要なときに見られる状態にすることです。
注4)エンコーダ-デコーダ(Encoder-Decoder)機構
機械学習モデルの一つであり、エンコーダとデコーダの二つの仕組みから構成されています。エンコーダは入力系列の重要な特徴を抽出する役割を担い、デコーダはエンコーダが抽出した特徴をもとに、系列を生成する役割を担います。
注5)アテンション(Attention)機構
機械学習の機構の一つで、入力されたデータのどこに注目すべきかを動的に特定する仕組みです。自然言語を中心に発展した機械学習の要素技術の1つです。

?
?
◆研究に関する問い合わせ◆
ballbet贝博足彩大学院グローバルイノベーション研究院 教授
藤田 桂英(ふじた かつひで)
TEL/FAX:042-388-7141
E-mail:katfuji(ここに@を入れてください)cc.tuat.ac.jp
?
関連リンク(別ウィンドウで開きます)
- ballbet贝博足彩 藤田桂英教授 研究者プロフィール
- ballbet贝博足彩 小池伸介教授 研究者プロフィール
- ballbet贝博足彩 藤田桂英教授 研究室WEBサイト?
- ballbet贝博足彩 小池伸介教授 研究室WEBサイト?
- 藤田桂英教授が所属する ballbet贝博足彩工学部知能情報システム工学科
- 小池伸介教授が所属する ballbet贝博足彩農学部地域生態システム学科
- ballbet贝博足彩融合研究支援制度『TAMAGO』
?